
Motori Robotica DeA

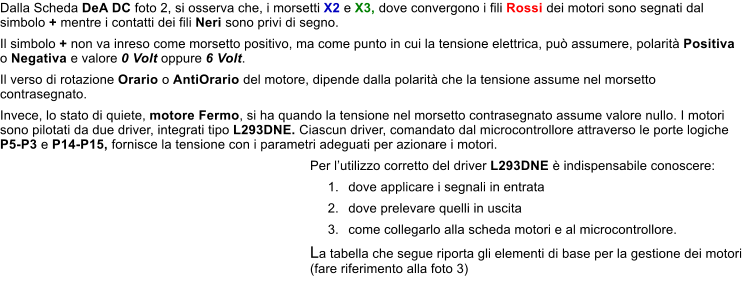
Perchè i motori possono ruotare in senso orario o antiorarioo? Che particolarità hanno i
morsetti X2 e X3 della scheda DeA DC? Che importanza ha la polarità della tensione
d'alimentazione? Quale livello deve avere un segnale logico per far ruotare un motore in
un senso o nell'altro? Quali sono i piedini d'ingresso e d'uscita dei Driver L293DNE?
Per rispondere a queste domande ho condotto una serie di prove pratiche mediante
l'uso del PC e del TESTER. I risultati rilevati li ho sintetizzati nella tabella più avanti.
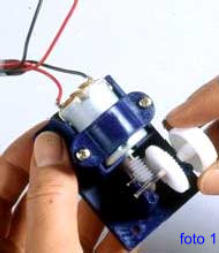
Ai motori sono saldati due fili:
•
Rosso polo positivo +
•
Nero polo negativo -
Attraverso questi fili i motori ricevono la corrente elettrica necessaria
per il loro funzionamento:
il Motore destro è collegato al morsetto X2 della scheda DeA DC
il Motore sinistro dal morsetto X3 della scheda DeA DC.

foto 2 - Scheda DeA DC

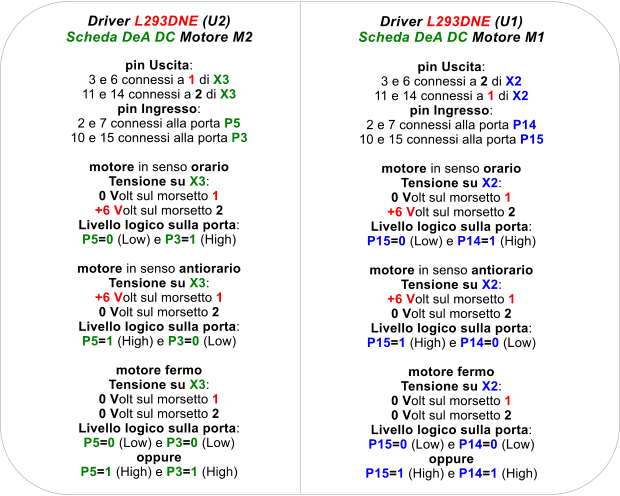
Tab. A - Per compilare la seguente Tabella ho utilizzato il simbolo 1 e 2 al posto di X2 e X3 riferimento foto 3.
Tab. A
MENU